Version 2.2.4
Note
Click here to download the full example code
import matplotlib.transforms as mtransforms
import matplotlib.pyplot as plt
from mpl_toolkits.axes_grid1.parasite_axes import SubplotHost
obs = [["01_S1", 3.88, 0.14, 1970, 63],
["01_S4", 5.6, 0.82, 1622, 150],
["02_S1", 2.4, 0.54, 1570, 40],
["03_S1", 4.1, 0.62, 2380, 170]]
fig = plt.figure()
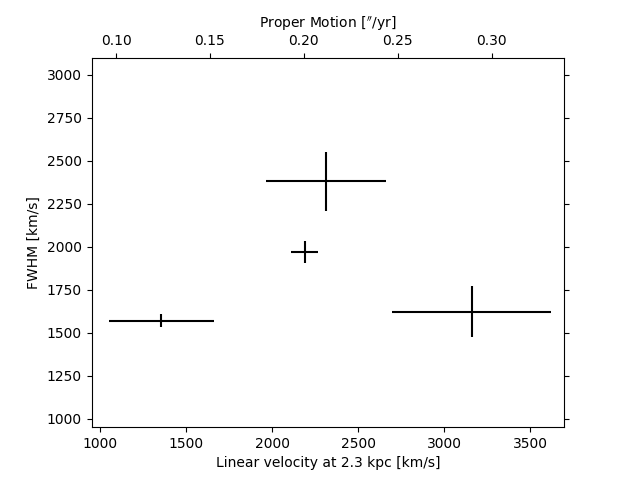
ax_kms = SubplotHost(fig, 1, 1, 1, aspect=1.)
# angular proper motion("/yr) to linear velocity(km/s) at distance=2.3kpc
pm_to_kms = 1./206265.*2300*3.085e18/3.15e7/1.e5
aux_trans = mtransforms.Affine2D().scale(pm_to_kms, 1.)
ax_pm = ax_kms.twin(aux_trans)
ax_pm.set_viewlim_mode("transform")
fig.add_subplot(ax_kms)
for n, ds, dse, w, we in obs:
time = ((2007 + (10. + 4/30.)/12) - 1988.5)
v = ds / time * pm_to_kms
ve = dse / time * pm_to_kms
ax_kms.errorbar([v], [w], xerr=[ve], yerr=[we], color="k")
ax_kms.axis["bottom"].set_label("Linear velocity at 2.3 kpc [km/s]")
ax_kms.axis["left"].set_label("FWHM [km/s]")
ax_pm.axis["top"].set_label(r"Proper Motion [$''$/yr]")
ax_pm.axis["top"].label.set_visible(True)
ax_pm.axis["right"].major_ticklabels.set_visible(False)
ax_kms.set_xlim(950, 3700)
ax_kms.set_ylim(950, 3100)
# xlim and ylim of ax_pms will be automatically adjusted.
plt.draw()
plt.show()
Keywords: matplotlib code example, codex, python plot, pyplot Gallery generated by Sphinx-Gallery